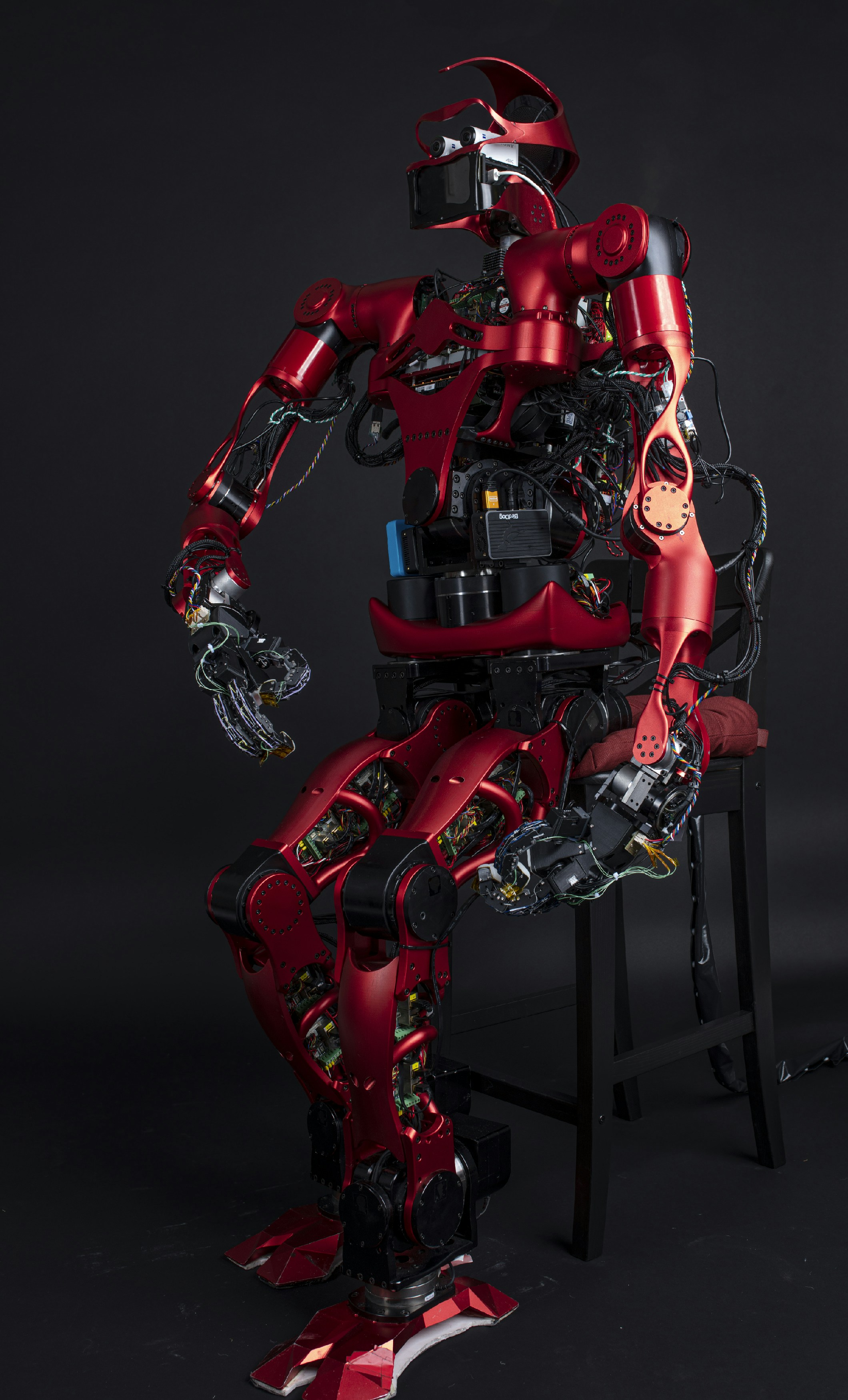
El problema con este robot humanoide (MKBHD) Problemas encontrados en el desarrollo y funcionamiento del robot humanoide: fallos mecánicos, software impreciso y desafíos éticos para la interacción con humanos. 2025-11-07 · 2 min